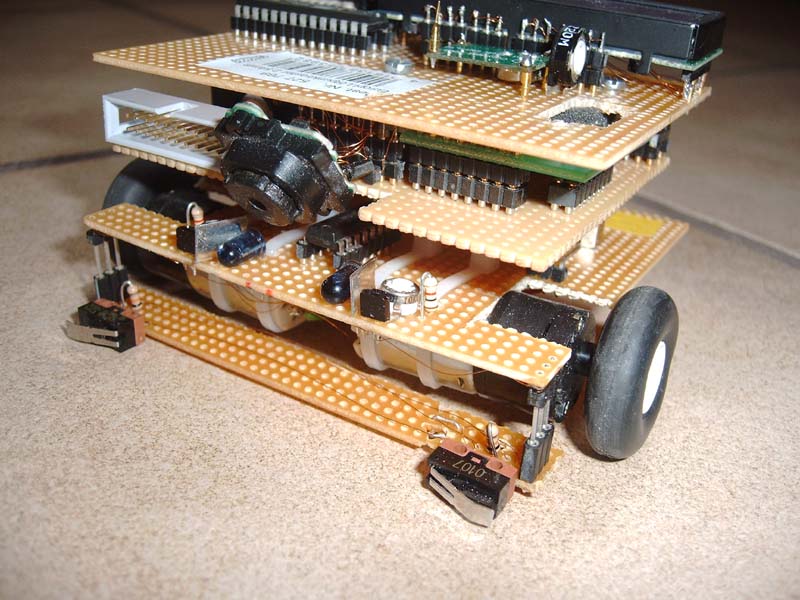
Zum einen sollte M2 natürlich klein und leistungsfähig sein, zum Anderen aber auch modular aufgebaut sein und in diesem Zusammenhang auch flexibel für die Installation neuer Komponenten/Module. Dises Konzept entsprach schließlich meinen Vorstellungen und sollte diese auch übertreffen.
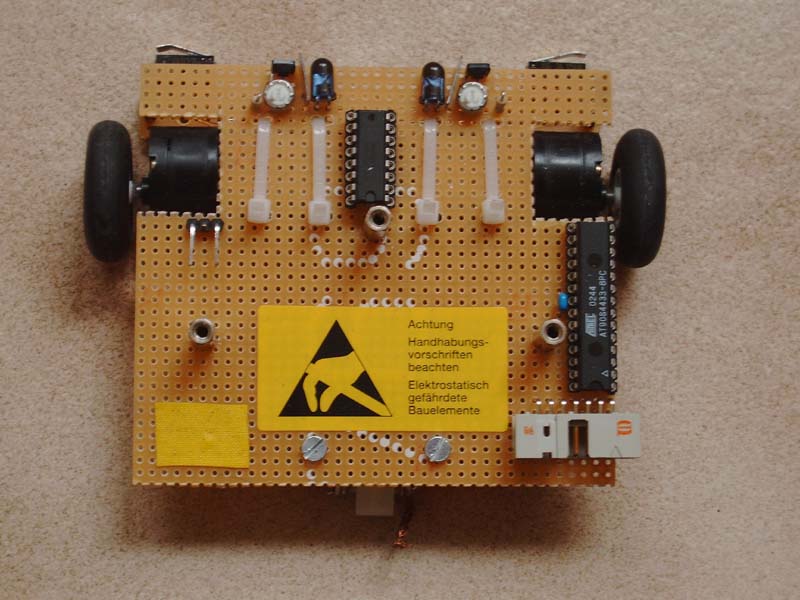
Die klobigen Servomotoren wurden für dese Ausbaustufe nicht mehr verwendet. statt dessen wurden zwei 12V Getriebemotoren verwendet, welche mittels Kabelbindern unter einer Lochrasterplatine befestigt wurden. Diese unterste Ebene sollte die komplette Hardware für den Antrieb enthalten und auch einige Sensoren zur Hindernisserkennung beinhalten (vier IR-Distanzsensoren und zwei Kollisionsschalter auf einer zusätzlichen Platine, welche sich unter der untersten Ebene befestigen lässt).
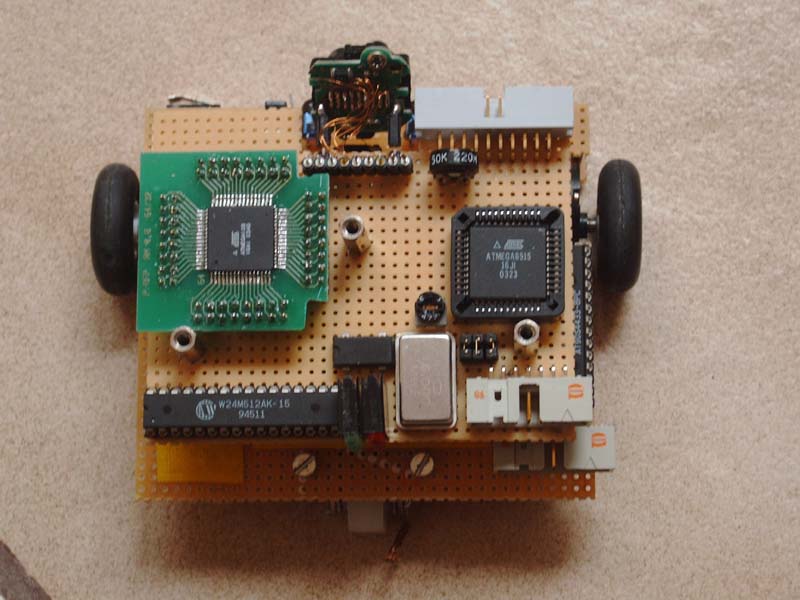
Die nächste Ebene war für die Kommunikation zwischen den einzelnen Ebenen/Controllern zuständig (ATMega8515 = MDN; Rechts) unter verwendung des aktuellen Netzwerkprotokolls (ausführliche Informationen folgen), für die Bildverarbeitung (ATmega128 = VDSP; links) mithilfe eines externen SRAM's (64 KB) und der GameBoy-Kamera ausgerüstet. desweiteren fand sich hier ein zusätzlicher Anschluss für ein monchromes Dot-Matrix-Display zur Anzeige der Kamerabilder. Dieses wurde allerdings niemals benutzt, da hierfür zu wenige freie Ports zur Verfügung waren. des Weiteren waren hier auch die zwei Oszillatoren für dei Taktung der Mikrokontroller vorhanden.
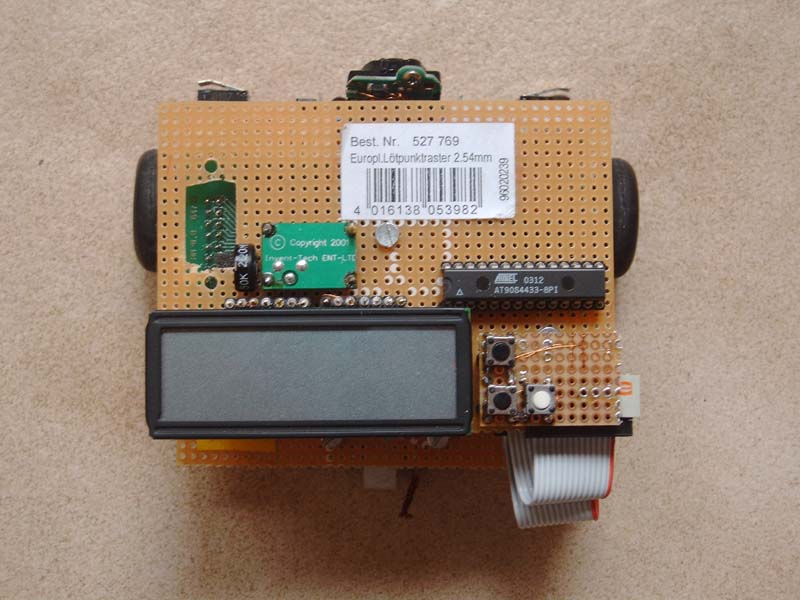
Die dritte und letzte Ebene war für die interaktion mit dem benutzer vorgesehen. Diese wurde über ein auf dem zweizeiligen Display dargestellten menüs und der nebenstehenden Tastatur ermöglicht. gesteuert wurde dies über einen AT4433 (= HID). Der hier ebenfalls zu sehende Funk-Sender war ursprünglich für eine drahtlose Verbindung zu einem Computer vorgesehen, allerdings hatte diese aufgrund von imensem Rauschen niemals richtig funktioniert.
Diese Version von M2 ähnelt schon sehr stark der aktuellen Version 3.