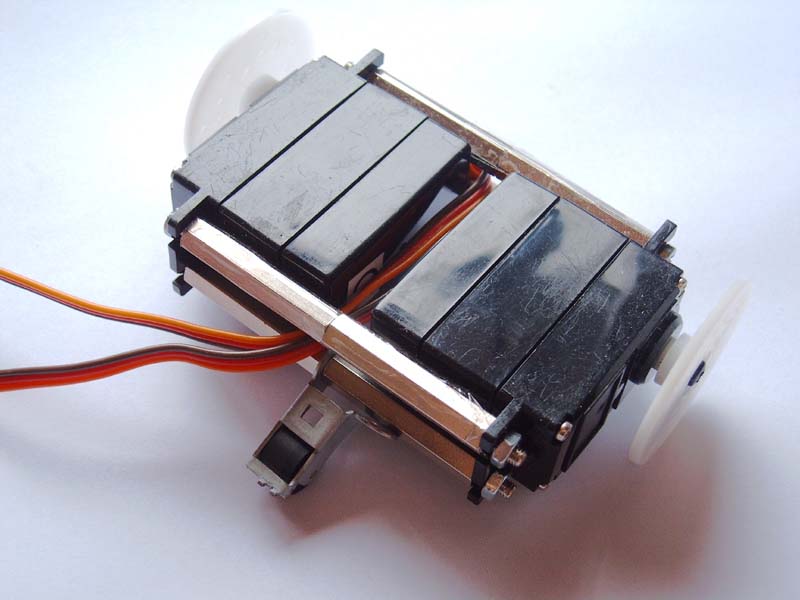
Da ich schon oft von modifizierten Servomotoren als Antriebselement gehört hatte, entschloss ich mich dazu ebenfalls solche zu verwenden. Dies war auch dahingehend sinnvoll, da auf dem neuen Roboter nicht viel Platz für einen großen 12V Akku, sondern lediglich platz für vier 1,2V Akkus war und die Servomotoren mit der Spannung von 4,8V sehr gut zurecht kamen. Ein Nachteil war allerdings, dass diese sehr laut und alles andere als zuverlässig waren.
Die beiden Servomotoren wurden so zusammengefügt, dass auf ihnen die verschiedenen Ebenen der Elektronik untergebracht werden konnten. Des Weiteren wurde ein kleines Freilaufrad montiert.
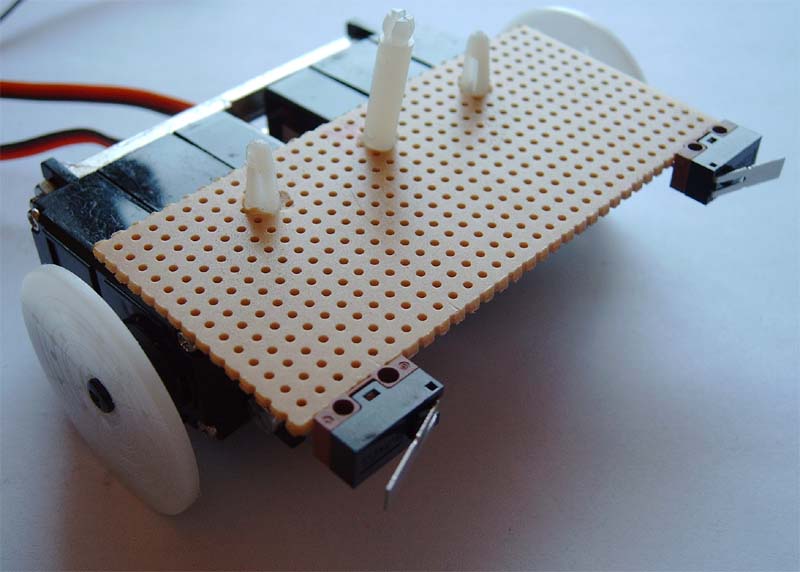
Auf dieses Chassis wurde mittels anklebbarer Plastik-Abstandshalter eine Platine montiert, auf welcher sich lediglich zwei Kontaktschalter montiert waren.
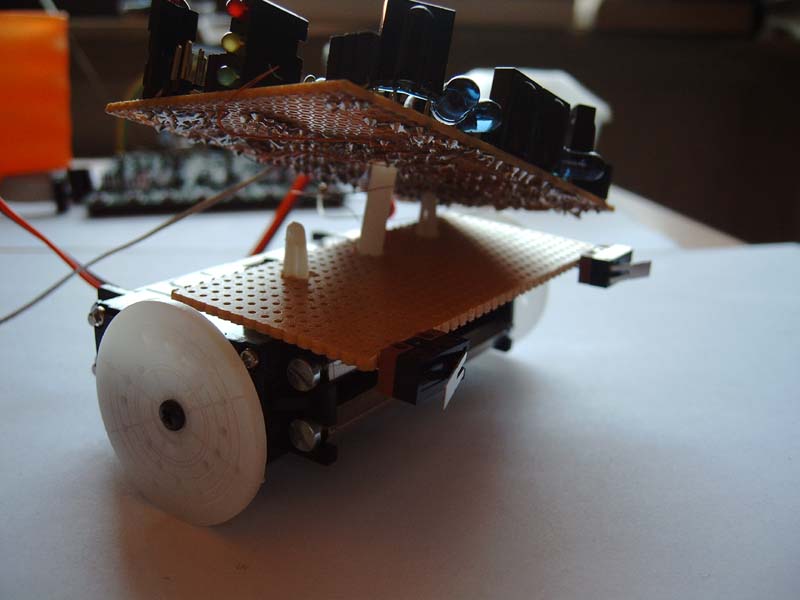
Mithilfe weiterer Plastik-Abstandhalter wurde hierauf die Haupt-Steuerplatine montiert.
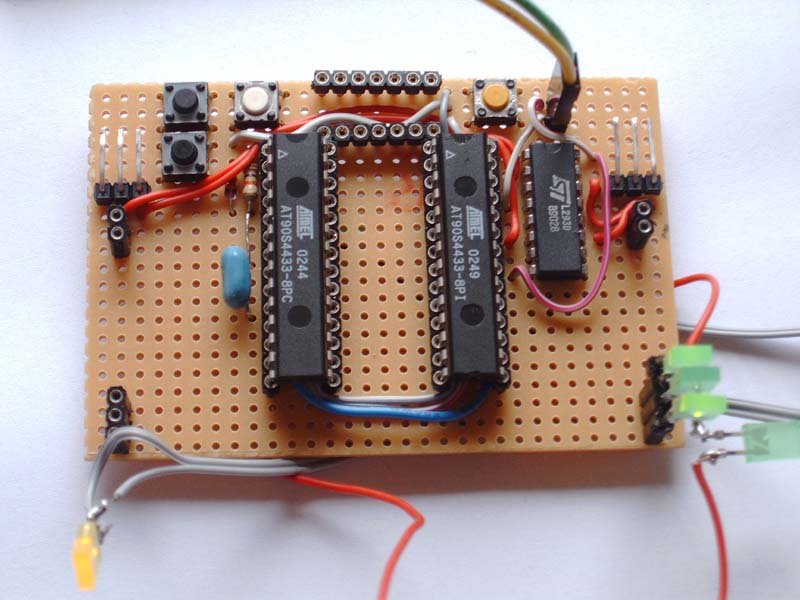
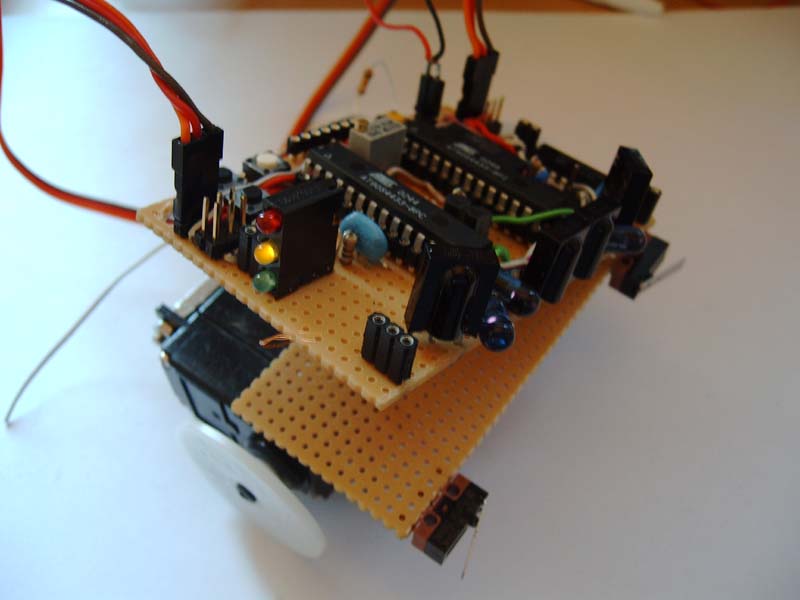
Auf dieser Platine waren zwei Mikrocontroller des Typs AT4433 montiert, welche mit einer Taktfrequenz von 8 MHz betrieben wurden. Der linke Controller war hierbei für die Auswertung der Kollisionsschalter und IR-Abstandswarner zuständig. Er generierte auch ein Motorsteuerkommando, welches über einen parallelen Datenbus an den rechten Controller weiter geleitet wurde. Dieser hatte lediglich die Aufgabe dieses Kommando an den Motortreiber-IC L293d weiter zu leiten.
Hier noch ein Bild der lauffähigen Version dieser Ausbaustufe... Die LED's an der Seite hatten keine spezifische Funktion.
Abschließend möchte ich natürlich nicht vorenthalten, dass dieser Roboter auch ein paar "Gehversuche" unternommen hatte. Diese können in diesem Video (ca. 755 kB) bestaunt werden.