Die Bewegungen werden durch eine ausgeklügelte Mechanik mittels eines einzigen Motors gesteuert. Dreht der Motor in die eine Richtung, so werden die Beine so angesteuert, dass eine Vorwärtsbewegung entsteht. Dreht der Motor in die andere Richtung, so werden die Beine auf der linken Seite angehalten und nur die Beine auf der rechten Seite vollführen eine Rückwärtsbewegung. Somit beschränken sich die Bewegungsarten leider lediglich auf eine Vorwärtsbewegung und eine Rechtsdrehung.

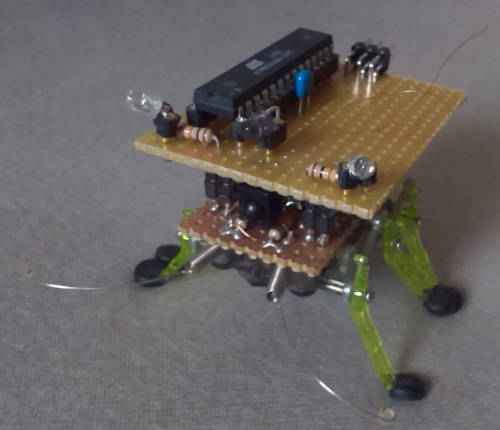
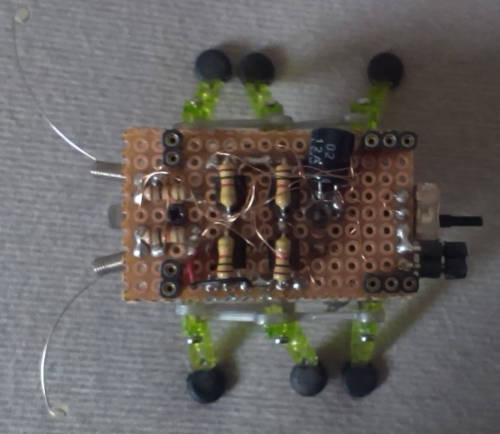
Für meinen Roboter habe ich die original Elektronik entfernt und zunächst eine Motorsteuerungsplatine eingebaut. Diese trägt eine diskret aufgebaute H-Brücke, einen Schalter zum Ein- und Ausschalten des Roboters, sowie die original "Antennen" zur Hindernisserkennung. Mithilfe von diversen Buchsenleisten kann eine weitere Platine montiert werden, welche den Mikrocontroller zur Steuerung trägt. Aber dazu später mehr.
Die Stromversorgung des Roboters wird über den im Körper des "Hex Bug" integrierten Batteriehalter realisiert. Dieser kann zwei Knopfzellen vom Typ "AG 13" tragen und liefert somit maximal 3V. In der "AUS"-Position kann der Roboter des Weiteren über eine externe Spannungsquelle mit Strom versorgt werden um auch längere Tests durchzuführen ohne einen zu großen Verschleiß an Knopfzellen zu haben.
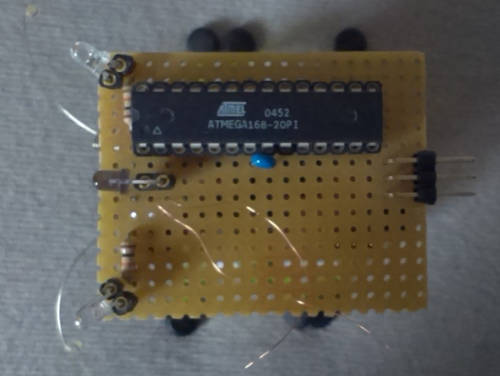
Die zweite Platine trägt nun den Mikrocontroller (ATMega168) zur zentralen Steuerung des Roboters, zwei Lichtdetektoren und eine IRDA-Schnittstelle zur dratlosen Datenübertragung. Programmiert wird der Mikrocontroller mittels der ISP-Schnittstelle, welche sich am hinteren Ende des Roboters befindet.
Das Programm des Roboters umfasst derzeit folgende Funktionalitäten: